Echtzeitfähige Datenstrecken in verschleißbehafteten Anwendungen
Fokus Echtzeit
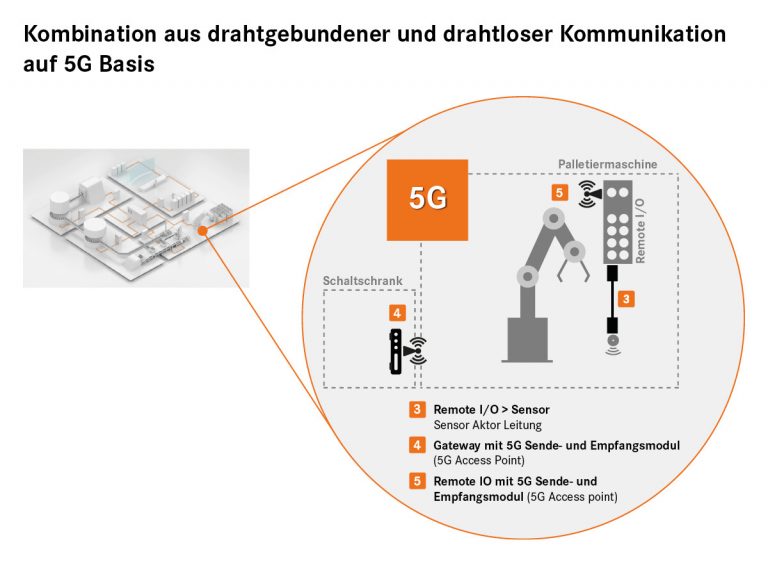
In jeder Werkshalle stehen mittlerweile unterschiedliche Antriebs- und Robotersysteme, die ein Werkstück von Prozessschritt zu Prozessschritt übergeben und dafür sorgen, dass diese präzise bearbeitet werden. Eine stabile und zuverlässige Reaktionszeit ohne große Latenz ist dabei sowohl für die Ansteuerung des Messsystems, Sensors oder Greifers an der letzten Achse, den sogenannten End-of-Arm Tools, als auch für die Synchronisation und Kommunikation zwischen den Robotern unabdingbar. Die Datenanbindung des End-of-Arm Tools erfolgt heute durch kabelbasierte Datenkommunikationen wie z. B. Digital I/O, I/O-Link oder Industrial Ethernet (PROFINET). Unter Umständen lohnt sich jedoch die Kombination zwischen kabelgebundener und drahtloser Kommunikation.


Drei Gründe für den Einsatz von Funktechnologien
- Der Verschleiß der Datenleitungen in den Dresspacks ist bei hoher Dynamik und aufgrund immer größerer Arbeitsräume der Roboter hoch. Damit erhöht sich das Risiko, dass die Systeme ausfallen.
- Kleine Losgrößen und ein häufiges Umrüsten erfordern flexible Kommunikationskonzepte, die eine Kommunikation der Komponenten untereinander in nahezu Echtzeit ermöglichen.
- Durch den Wegfall von Datenleitungen im Dresspack reduziert sich das Gewicht und der Roboter kann dynamischer agieren.
Was 5G leisten muss, um Datenleitungen zu ersetzen
- Die Ansteuersignale müssen End-of-Arm Tools wie beispielsweise einen Greifer in Echtzeit erreichen. Dieser muss dabei nicht in Ruhe sein – Remote IO wird per Funk an die Steuerung angebunden.
- Die geforderten Latenzen von 4-8ms müssen eingehalten werden. Das ist durch 5G zukünftig umsetzbar. Zum Vergleich: Heutige WLAN-Strecken sind begrenzt auf 10ms.
Grenzen von 5G
Eine mögliche Lokalisierung des Greifers auf bis zu +/- 0,5mm ist Stand heute mit 5G nicht machbar!
Sie möchten mehr darüber erfahren? Lesen Sie den vollständigen Use Case echtzeitfähige Datenstrecken in verschleißbehafteten Anwendungen